







文章目录
摘要
本篇文章用STM32CubeMX和STM32CubeIDE软件编程,主控芯片为STM32F407ZGT6驱动LED、按键和蜂鸣器,通过按键来控制蜂鸣器和LED灯的状态。这三个外设都较为基础和简单,适合初学者的第一个代码程序,并且电路图以及操作也都大同小异。通过本文可以初步学会使用和操作GPIO相关功能。
所用工具:
1、芯片: STM32F407ZGT6
2、驱动设备:LED&按键&蜂鸣器
3、配置软件:STM32CubeMX
4、IDE: STM32CubeIDE
知识概括:
通过本篇文章您将学到:
1、LED&按键&蜂鸣器工作原理
2、GPIO相关操作与功能
一、简介
1.GPIO简介
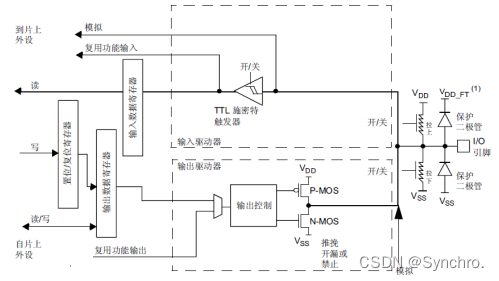
STM32F4系列MCU一般有多个GPIO(General Purpose Input-Output)端口,每个端口由16个引脚,作为GPIO引脚使用时,我们可以输入或输出数字信号。STM32F407ZHG芯片有8个16引脚的GPIO端口,从PA到PH,这些GPIO端口都连接在AHB1总线上,最高时钟频率为168MHz,GPIO引脚能承受5V电压。每个引脚的输入输出数据可以单独设置。其内部有双向保护二极管,有可配置是否使用的上拉和下拉电阻,每个GPIO引脚可以配置多种工作模式。其内部结构图如图所示。
GPIO工作模式
1、作为GPIO输入
(1)输入浮空(Input floating),并且不使用上拉或下拉。
(2)输入上拉(Input pull-up),使用内部上拉电阻,引脚外部无输入时读取的引脚输入电平为高电平。
(3)输入下拉(Input pull-down),使用内部下拉电阻,引脚外部无输入时读取的引脚输入电平为低电平。
2、作为GPIO输出
(1)具有上拉或下拉的开漏输出(Output open-drain)。如果没有上拉或下拉,开漏输出1时引脚是高阻态,输出0时引脚是低电平,这种模式可用于共用总线的信号。
(2)具有上拉或下拉的推挽输出(Output push-pull)。如果没有上拉或下拉,推挽输出1时引脚为高电平,输出0时引脚为低电平。若需要增强引脚输出驱动能力,就可以使用上拉。
3、作为ADC或DAC引脚
(1)模拟(Analog 功能),作为GPIO模拟引脚,用于ADC输入或DAC输出引脚。
4、作为复用功能引脚
(1)具有上拉或下拉的复用功能推挽(Alternate function push-pull)
(2)具有上拉或下拉的复用功能开漏(Alternate function open-drain)
每个GPIO端口有4个32位寄存器,用于配置GPIO引脚的工作模式,1个32位输入数据寄存器和1个32位输出寄存器,还有复用功能选择寄存器等,所有未进行任何配置的GPIO引脚,在系统复位后处于输入浮空模式。
2.LED
**LED(light-emitting diode),即发光二极管,是一种能够将电能转化为可见光的固态的半导体器件,它可以直接把电转化为光。**LED的心脏是一个半导体的晶片,晶片的一端附在一个支架上,一端是负极,另一端连接电源的正极,使整个晶片被环氧树脂封装起来。其实物如图所示。

3.按键
按键在生活中用处特别广泛,键盘就是一组按键,在单片机外围电路中,通常用到的按键都是机械弹性开关,当开关闭合是线路导通,开关断开时线路断开。
4.蜂鸣器
蜂鸣器是一种一体化结构的电子讯响器,采用直流电压供电,广泛应用于计算机、打印机、 复印机、报警器、电子玩具、汽车电子设备、电话机、定时器等电子产品中作发声器件。蜂鸣器主要分为压电式蜂鸣器和电磁式蜂鸣器两种类型。 本次使用的是电磁式有源蜂鸣器,这里的有源不是指电源的“源”,而是指有没有自带振荡电路,有源蜂鸣器自带了振荡电路, 一通电就会发声;无源蜂鸣器则没有自带振荡电路,必须外部提供2~5Khz左右的方波驱动, 才能发声。其实物如图所示。

二、硬件电路设计
1.LED电路

图中,将DS0 接 PF9,DS1 接 PF10。由图可知,只要给引脚输送一个低电平,使LED两端形成电势差即可点亮LED。
2.按键电路
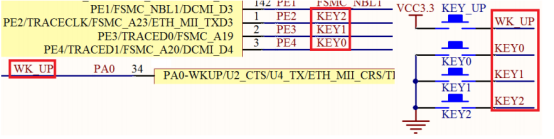
按键 KEY0 连接在 PE4 上、KEY1 连接在 PE3 上、KEY2 连接在 PE2 上、KEY_UP连接在 PA0 上。
这里需要注意的是:KEY0、KEY1 和 KEY2 是低电平有效的,而 KEY_UP 是高电平有效的,并且外部都没有上下拉电阻,所以,需要在 STM32F4 内部设置上下拉。
2.蜂鸣器电路
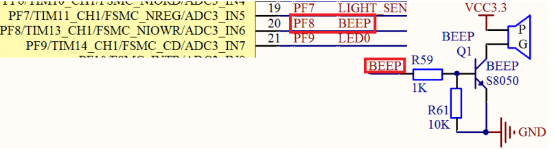
图中我们用到一个NPN三极管(S8050)来驱动蜂鸣器,R61主要用于防止蜂鸣器的误发声。当PF8输出高电平的时候,蜂鸣器将发声,当PF8输出低电平的时候,蜂鸣器停止发声。
三、软件设计
1.CubeMX配置
(1) 时钟配置
如下图分别为设置HSE(高速外部时钟)以及时钟树的配置。选定HSE之后芯片会自动选定两个引脚用来连接外部晶振,如图5所示。设置LSE之后配置时钟树,设置HCLK为100MHz(也可以设置168MHz),其配置图如图所示。


(2) 调试接口配置
如图所示,将调试接口设置的设置为SW模式,占用芯片两个引脚。

(3) GPIO配置
如图,在CubeMX中芯片的引脚中点击鼠标左键可以给引脚设置功能。

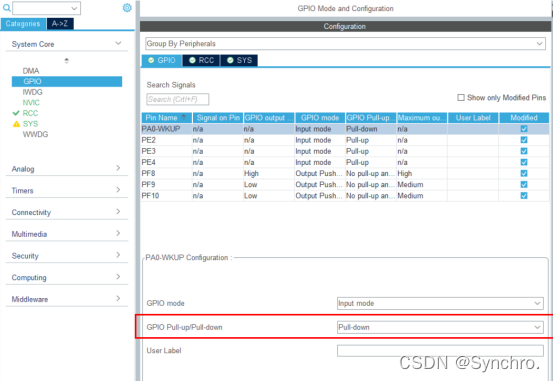
这里我们将LED灯(PF9,PF10),蜂鸣器(PF8)设置为GPIO_Output,将4个按键(PA0,PE2,PE3,PE4)设置为GPIO_Input,结果如图所示。

在GPIO工作模式设置中按如图所示设置,其中四个按键配置为输入模式之后需要设置上拉与下拉,由原理图可知,将PA0设置为下拉,其他为上拉。
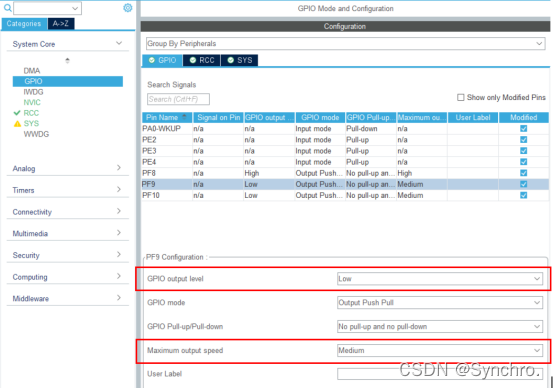
在输出配置中有GPIO输出电平,输出模式,上拉下拉,最高输出速率。由原理图可知LED灯的输出电平设置为低时则接上就会亮,而蜂鸣器设置为低则会响。将GPIO模式都设置为推挽模式,由于蜂鸣器音调一般由PWM波频率控制,所以蜂鸣器的最高速率可以设置为高,LED则无要求。
(4) 引脚使用情况
如图所示,本次除了调试接口和外部震荡外,只要引出7个引脚即可(蜂鸣器一个引脚,LED两个引脚,按键四个引脚),实验比较简单,也适用于其他芯片,学者也可以加更多的功能。

(5) 保存
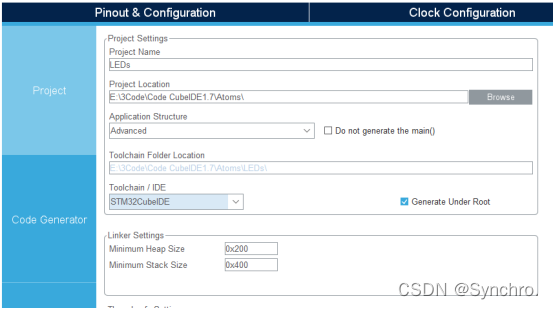
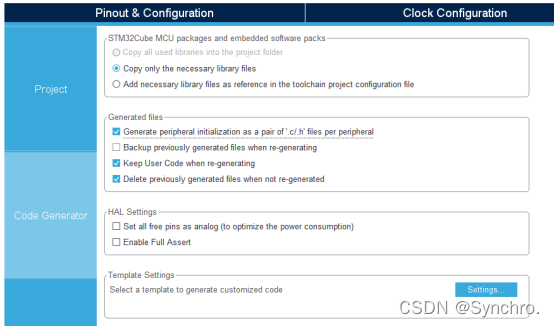
在ProjectManager中设置如如图所示,设置集成开发环境为STM32CubeIDE。运用其他平台比如IAR,Keil也可以对应选择。
2.CubeIDE代码
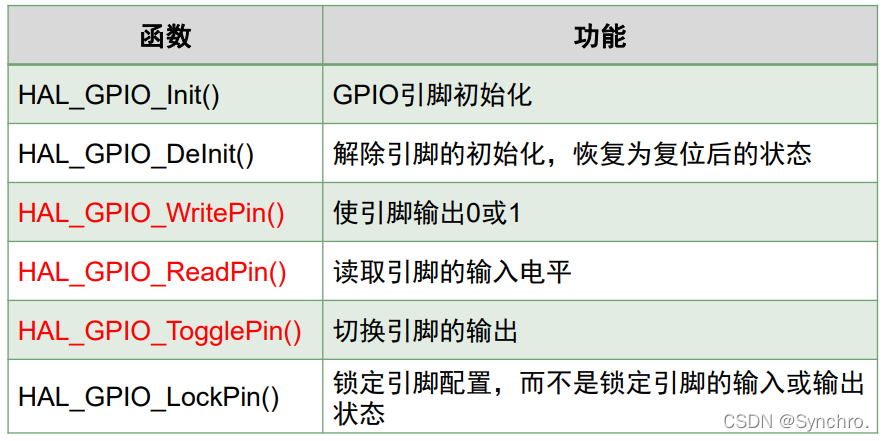
(1) GPIO相关HAL函数
GPIO函数很少,读者只要熟练掌握标红的三个函数即可,分别是写,读和翻转操作。
(2)代码
因为代码比较简单,所以放在一起。
功能:初始状态是LED灯亮,蜂鸣器响,按下PA0翻转蜂鸣器,按下PE2,翻转PF9,按下PE3,点亮PF10,按下PE4,熄灭PF10。
位置:位于/* USER CODE BEGIN WHILE */沙箱内。
/* USER CODE BEGIN WHILE */
while (1)
{
if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_SET) //如果PA0被按下
{
HAL_GPIO_TogglePin(GPIOF, GPIO_PIN_8); //翻转PF8 蜂鸣器
HAL_Delay(40); //消抖
}
if(HAL_GPIO_ReadPin(GPIOE, GPIO_PIN_2) == GPIO_PIN_RESET) //如果PE2被按下
{
HAL_GPIO_TogglePin(GPIOF, GPIO_PIN_9); //翻转PF9 LED
HAL_Delay(40); //消抖
}
if(HAL_GPIO_ReadPin(GPIOE, GPIO_PIN_3) == GPIO_PIN_RESET) //如果PE3被按下
{
HAL_GPIO_WritePin(GPIOF, GPIO_PIN_10, GPIO_PIN_RESET); //点亮PF10 LED
HAL_Delay(40); //消抖
}
if(HAL_GPIO_ReadPin(GPIOE, GPIO_PIN_4) == GPIO_PIN_RESET) //如果PE4被按下
{
HAL_GPIO_WritePin(GPIOF, GPIO_PIN_10, GPIO_PIN_SET); //熄灭PF10 LED
HAL_Delay(40); //消抖
}
/* USER CODE END WHILE */
3.结果显示
结果如图所示。

四、总结
点灯是单片机开始的入门课程,相当于C语言中的HelloWorld,是所有课程的基础,一定要搞清楚GPIO的原理,才能对单片机有一个系统的理解,学者可以结合定时器功能对LED和蜂鸣器进行改进。本次设计参考正点原子探索者开发板以及STM32Cube高效开发教程。
五、附录
完整代码
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_SET) //如果PA0被按下
{
HAL_GPIO_TogglePin(GPIOF, GPIO_PIN_8); //翻转PF8 蜂鸣器
HAL_Delay(40); //消抖
}
if(HAL_GPIO_ReadPin(GPIOE, GPIO_PIN_2) == GPIO_PIN_RESET) //如果PA0被按下
{
HAL_GPIO_TogglePin(GPIOF, GPIO_PIN_9); //翻转PF9 LED
HAL_Delay(40); //消抖
}
if(HAL_GPIO_ReadPin(GPIOE, GPIO_PIN_3) == GPIO_PIN_RESET) //如果PA0被按下
{
HAL_GPIO_WritePin(GPIOF, GPIO_PIN_10, GPIO_PIN_RESET); //点亮PF10 LED
HAL_Delay(40); //消抖
}
if(HAL_GPIO_ReadPin(GPIOE, GPIO_PIN_4) == GPIO_PIN_RESET) //如果PA0被按下
{
HAL_GPIO_WritePin(GPIOF, GPIO_PIN_10, GPIO_PIN_SET); //熄灭PF10 LED
HAL_Delay(40); //消抖
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 4;
RCC_OscInitStruct.PLL.PLLN = 100;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_3) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */















 4932
4932











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









